Multi-rotors, Drones, Quad-copters, oh my!
So…. I recently took the plunge into the hobby of multi-rotor robotics! I purchased a DJI Phantom (pictured during repairs):

It’s an amazing piece of machinery and comes ready to fly (RTF). My first flight was a trip, I opened the box, brought out the plane, and was going! However, the flight was over quickly because I didn’t realize you have to plug in both of the power cables on your batteries into the charger when you charge 🙂
At any rate, flying the quad was way more awesome than I had thought it would be and the video that came out of it was incredible! In the time since that first flight, I have broken my plane but I’ll have it repaired soon, hopefully!
Why did I get into this?
Video and photography. After seeing what people are doing with these, I have wanted to take shots from the sky. A great sample video taken from a Phantom was shot at Burning Man this year:

Drone’s eye view of Burning Man 2013 from ekai on Vimeo.
What are the parts of a drone?
Take a look at this photo of the Phantom (via Zimbio):
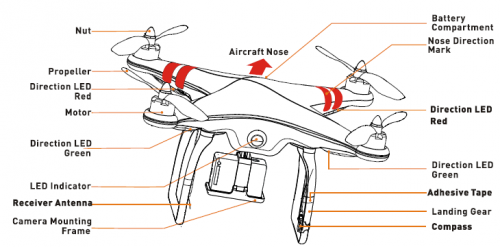
There are a few key parts here:
- The main craft
- The receiver antenna
On the craft itself, there are LEDs running along the bottom and an indicator light on the back. These are to orient you to the craft’s position while it’s flying. Stickers should be placed on the frame as well to indicate orientation.
How do you fly it?
The controls are relatively simple:
- Moving the left stick left to right rotates the quad.
- Moving the left stick up and down raises and lowers the quad.
- Moving the right stick up and down moves the quad forward and back.
- Moving the right stick left and right strafes the quad left and right.
If you are familiar with console gaming, it’s FPS controls, basically. Flying around kinda feels like whooping some butt on Halo or MW.
Moving along, if you let go of the controls, the craft will hover in place. This is the best part! If you lose control you just drop the sticks and then can slowly reorient yourself to what the craft is doing. In a similar vein, if the craft gets low on batteries, an indicator light on the back of the craft will signal that it’s time to head home. If signal is lost on the craft, the craft will either use GPS to return to where it started or will use its FailSafe (FS) to slowly land.
Multi-rotors and the law
Yes, flying around things in the air with cameras on them requires regulation. The regulations vary state-to-state on exactly how and where you can fly but there is one rule that applies everywhere:
- Never fly more than 400 ft above ground level.
This requirement is made by the FAA and is pretty hard and fast. The most specific FAA regulations applying to drones is AC 91-57, which pretty much says never fly above 400 feet.
In terms of flying around public places, you are liable for any damage you cause.
When flying around houses and neighborhoods where people are, you potentially can violate their privacy. The privacy laws are still in flux for how to regulate this but in California, legislation is being pushed through protecting the privacy of its citizens because paparazzi were using drones to eavesdrop on people’s private property.
I think the general usage advice is that you should be responsible about safety in the air and on the ground and should respect people’s privacy.
Getting started with quad copters
Getting into multi-rotors is unnecessarily difficult. The parts can be expensive and I have yet to see a simple tutorial on actually buying parts. Although sites sell ready-to-fly (RTF) kits, it is still confusing figuring out what you need to get in addition (to a kit) and why you need to get it. I’ll try and break it down for you.
The parts that you put into a basic multi-rotor are:
- Frame
- Motor
- Electronic Speed Controller (ESC)
- Propellers
- Flight Controllers
- Batteries
- Radio (Tx/Rx)
Optional Parts consist of:
- Gimbal
- First Person View (FPV)
- Telemetry, retractable gear
Frames
Frames determine various characteristics of your multi-rotor build. In short, smaller frames are more nimble and inexpensive. Larger frames are stronger in the wind and can carry larger payloads. I’ll cover a few pros and cons of each.
Larger Frames
Pros:
- Larger frames can take larger blades, meaning they can max out more power in this area.
- Larger frames are more powerful and can carry larger loads.
- Larger frames are stronger in the wind.
Cons:
- Larger frames will require stronger batteries, more complete blade, motor, esc combos in hexa- and octo- setups, and stronger motors. This means they will cost you more both in the near term and in terms of replacing parts.
- Can be large enough to be difficult to transport.
Smaller Frames
Pros:
- Smaller, lighter, easier to move.
- Less expensive.
- Less likely to cause damage to people or property in a crash.
- Can get more flight time per dollar.
Cons:
- Smaller payloads.
- Less room onboard for add ons.
Overall Thoughts
For my purposes a 450 or 550 mm frame is perfect. These are a great size for about a $25 ~900kv motor and 30A Electronic Speed Controllers (ESCs) which are at the sweet spot for price performance tradeoffs. At this size, you can carry a camera payload as well as most of add-ons that you would want to grow into. Going with a 450 or 550 would allow for 10″ blades too, which means you could upgrade to heavier payload capabilities. To make larger craft easier to move, frames can fold down, which is nice. Most large (1M) setups employ both folding frames and retractible gear, discussed later.
Motors
I didn’t really look too deeply into motors but in general, motor “speed” is really determined by the KV rating. Higher KV = higher RPMs per volt applied. It’s like motorcycles versus trucks though, the lower KV motors will have more lift and will take larger blades, translating to more power. An easy pick balancing between the two is the 920KV choice used in the DJI Phantom and shared on many RTF kits built on the 330-550 mm frames.
Propellers
Propellers mostly will have an affect on aircraft lift. Larger props means more power and heavier payloads at the expense of how nimble the craft can be. If, like me, you’re interested in carrying a camera on your helicopter, larger blades are better. On my hypothetical build, my craft would use 10″ blades.
Flight controllers
This is the brain of your aircraft. The flight controller (FC) is used to stabilize the aircraft, proxy control to the motors, and perform navigation if you have a GPS module. The Phantom ships with the NAZA M and DJI offers a more sophisticated FC, the NAZA v2. A quick comparison shows the V2, the fancier of the two, can control more motors and has a higher degree of granular control over the flight. The better flight controllers support GPS modules and many kits sell GPS and FC together. The most popular FC I know of is the Ardupilot, based on the Arduino board, because it is easy to program and open source. There are a number of other custom FCs that are typically much less expensive than the brand name ones.
Electronic Speed Controllers (ESCs)
These parts sit between the flight controller and the motors. They control the speed of the motor and are classified by their maximum amperage rating. In this way, ESCs are a bottleneck on power delivered to motors so the higher the amperage rating, the more power you can run to your motors. ESCs also have a refresh speed that determines how smoothly they can control motor speed. Amps and refresh rate are what you’re looking for. In my opinion, any 30A ESC that can take 4S should be sufficient for a build.
Batteries
Batteries are measured in number of solenoids (S) which is just the number of batteries in the battery pack and mAh which is for all intents and purposes the amount of fuel on your craft. These are heavy, so going with more Ss means adding precious weight to your craft. However, with larger battery packs, you will get more mAh which translates to longer flight times.
Radio Tx/Rx
The radio transmitter and receiver will determine how far away you can fly and how many bells and whistles you can control on that aircraft. The minimum you are going to want is 4 channels (those 4 directions on the sticks) and if you go up to 6 channels, you will be able to control a motorized gimbal (left/right and tilt-up/tilt-down). The controls for the additional directions are on the top of the transmitter like R1/R2 buttons on a PlayStation controller. The range on the Phantom is rated to 1000M and the RTF controller it ships with is 7 channels. The additional channels on the Phantom allow the user to switch modes on the flight controller.
Overall Thoughts on a Build
The pieces that you choose will determine the characteristics of your craft. For example, with propellers, you can do all sorts of things:
- Increase flight time
- Increase aircraft lifting power
- Balance flight
When building out your craft think of what you want to do with it and which tradeoffs you are making to get there. Although I got the Phantom because I was confused about the parts I needed to buy, if I did it all over, I would have picked out my parts individually and built the following:
- 450 mm frame ($30-50)
- 4x 920KV motors ($100)
- 4x 10″ props ($30)
- 4x 30A ESCs ($50)
- 2x 3S battery ($40)
- Dx6i combo transmitter / receiver system ($180)
- NAZA M FC ($200)
- GoPro camera mount
For the GoPro, you could just use one of the stickable mounts and secure it with zip ties also.
The total cost here would be in the $600 range in parts and you would still need to get a charger. On second thought, the Phantom (available from Amazon) seems like a pretty good deal at under $500! If you got a cheap Flight Controller (FC) and Transmitter/receiver, you could probably shave off $200. However, these parts add a ton of value in terms of expandability and having nice parts makes it easier to get started and upgrade. For example, the NAZA gets regular firmware updates and the Ardupilot has an active hacker community. For a knock-off of either, it’s unlikely you would get much support.
I think it’s worth noting that somebody could make a whole lot of newbs happy by whipping together a configuration tool that lets you see the hypethetical flight time, power, and payload for various builds (*I’m looking at you Hobbyking…).
Bells and whistles
So you have heard of the basics of a quadcopter build, how about the fancier add-ons that people typically upgrade to.
A typical upgrade path:
- Quad
- Quad with camera
- Quad with camera and gimbal
- Quad with camera, gimbal, and (first person view) FPV
With each of these upgrades, you build on the capabilities of your craft. By adding a camera, you get to take video. By adding a gimbal, you can take smoother, better, video. With an FPV, you can see the video you are shooting and can take some guesswork out. Let’s take a closer look at various optional upgrades.
Gimbals
A gimbal attaches to the bottom of your craft and smooths video out while also letting you control the camera. This is the natural progression from having a camera on your aircraft because you will want to take smoother video. Gimbals start at around $150 and can easily cost up into the thousands of dollars. The better gimbals use brushless motors to control the gimbal and stabilize. If your flight controller supports it, you can connect the gimbal directly to it and then let the FC use its accelerometer / gyro data to stabilize footage that you capture. If your Transmitter / Receiver supports it, you can set up additional channels to the gimbal motors to control where the camera faces.
The choice Gimbal on the Phantom is the ZenMuse 3D. This (expensive!) gimbal is already equipped with a setup that will allow you to plug in your GoPro for seeing out of the camera, which is part of why it’s so expensive. Other gimbals are available and will stabilize just as well, however to hook these up to video feeds, you will need to do more work, which leads me to the next accessory, FPV.
First Person View
First Person View (FPV) lets you see through a camera on the craft. For example, you can hook up the ZenMuse 3D Gimbal to the GoPro and then the signal from the camera will be mirrored into your goggles. Popular goggles are the FatShark FPV set. The disadvantage of FPV is that it kills your peripheral vision, making it easy to crash into things that you just can’t tell are in front of you.
As an alternative to using FPV, you can use a screen on your controller or attached to the top to see what the drone sees. This is in many cases preferable because you will be much better equipped to avoid obstacles while flying.
I have never flown FPV but I really badly want to now. I realized this while flying around and losing track of what I was facing. Also, this is pretty much the only way that I would want to fly all the way around objects or fly away to distances further than I can see.
Telemetry and Retractable Landing Gear
After you have FPV, you can go even further and add telemetry. This would give you realtime information about the state of the craft such as altitude, voltage, temperature, and tilt data. With telemetry data, you can fly better while in FPV, can have a better understanding of how your craft is doing, and can also get more consistent angles in video. Telemetry is a smaller upgrade than FPV typically and many controllers can receive telemetry data and display it right there on the controller.
Larger craft oftentimes employ retractable legs so that they can both get out of the way of the camera and so that the flight of the drone is smoother. These are controlled using additional channels on your radio. At the point where you are retracting your gear to get a better picture, you are probably getting near the pro level because at this point it’s probably getting super expensive.
Conclusions
Drones are fun, get one! Just kidding, it’s an expensive hobby that’s not for everybody. If you can do it, can afford it, and are interested, I strongly recommend getting off the fence and buy or build a kit, it’s a wonderful hobby. The videos that come out of flights and the joy of flying through the air while feeling in control is awesome. I’m still a total newb at this but I’ll be sticking with it and will be making better videos and maybe later taking more photography from the sky.
Please ask me any questions you might have about multi-copters, I am happy to discuss builds or answer newb questions that stumped me when I was started.
Hi there. Was wondering if you would be willing to help me figure out what happened to our rotor drone. My dad was flying it at 50 ft when it took a plunge and now its messed up and wont fly correctly. Let me know if your willing to help.
I’m happy to help! A few things to check:
Are the propellers in good shape?
Did you recalibrate the Gyro sensor?
Is the copter responding to radio?
Bebop vs bebop 2 drone